 Web3起点网
Web3起点网Web3赋能AI机器人:破解中心化困局与万亿市场机遇
几十年来,机器人技术主要局限在工厂等结构化环境中执行重复任务。然而,人工智能正在彻底改变这一局面,使机器人能够理解指令并适应动态环境。我们正迎来一个高速增长的时代:花旗银行预测,到2035年全球将部署数十亿台机器人,应用场景将从工厂延伸至家庭和服务业;摩根士丹利则估计,仅人形机器人市场的规模就将达到数万亿美元。尽管前景广阔,这一扩张也带来了中心化控制、数据隐私和系统可扩展性等核心挑战。而Web3技术凭借其去中心化、可验证和隐私保护的特性,为构建协作型机器人网络提供了全新的解决框架。本文将深入探讨AI机器人价值链的演进,并揭示其与Web3融合所带来的重大机遇。
机器人四层进化论:从钢铁之躯到自主意识觉醒
AI机器人价值链由四个基本层面构成:硬件、智能、数据和代理。每一层都建立在前一层之上,共同支撑机器人在复杂现实环境中实现感知、推理和行动的能力。
近年来,在Unitree和Figure AI等行业先锋的推动下,硬件层取得了显著进展。但非硬件层面仍面临诸多关键挑战,包括高质量数据集的匮乏、通用基础模型的缺失、跨设备兼容性较差以及对可靠边缘计算的需求。因此,最大的发展机遇集中在智能层、数据层和代理层。
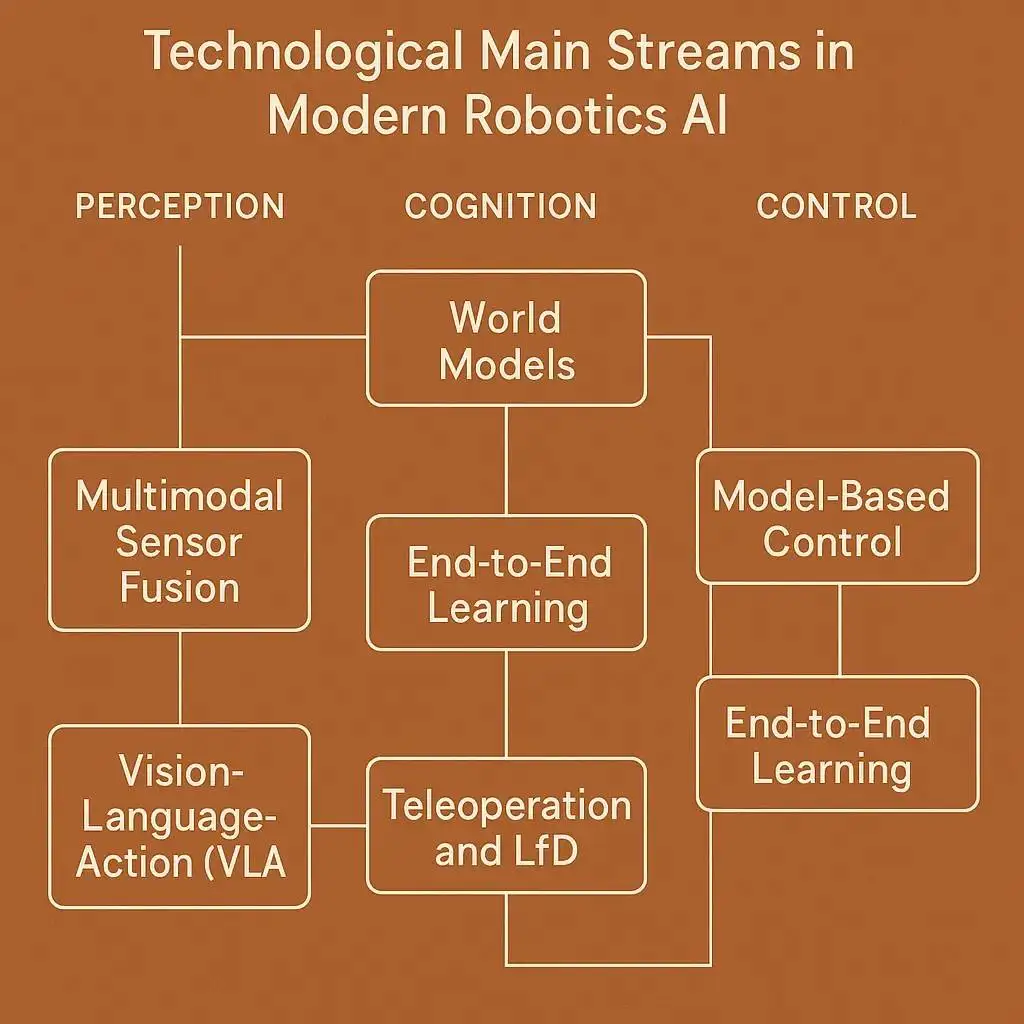
硬件层作为机器人的“身体”,涵盖了执行器、传感器和嵌入式计算三大核心组件。智能层则扮演“大脑”角色,依赖的基础模型和先进控制策略实现自主决策。数据层为大脑提供“知识”,其质量取决于数据数量、质量和多样性三大支柱。而代理层则推动机器人向“物理AI代理”演进,实现持续学习、自主经济系统和多代理协同。
这四个层次共同构成了机器人从机械执行到自主意识觉醒的完整进化路径,也为Web3技术的融合提供了结构性切入点。
机器人的钢铁之躯:特斯拉Optimus如何练就人类级灵活性?
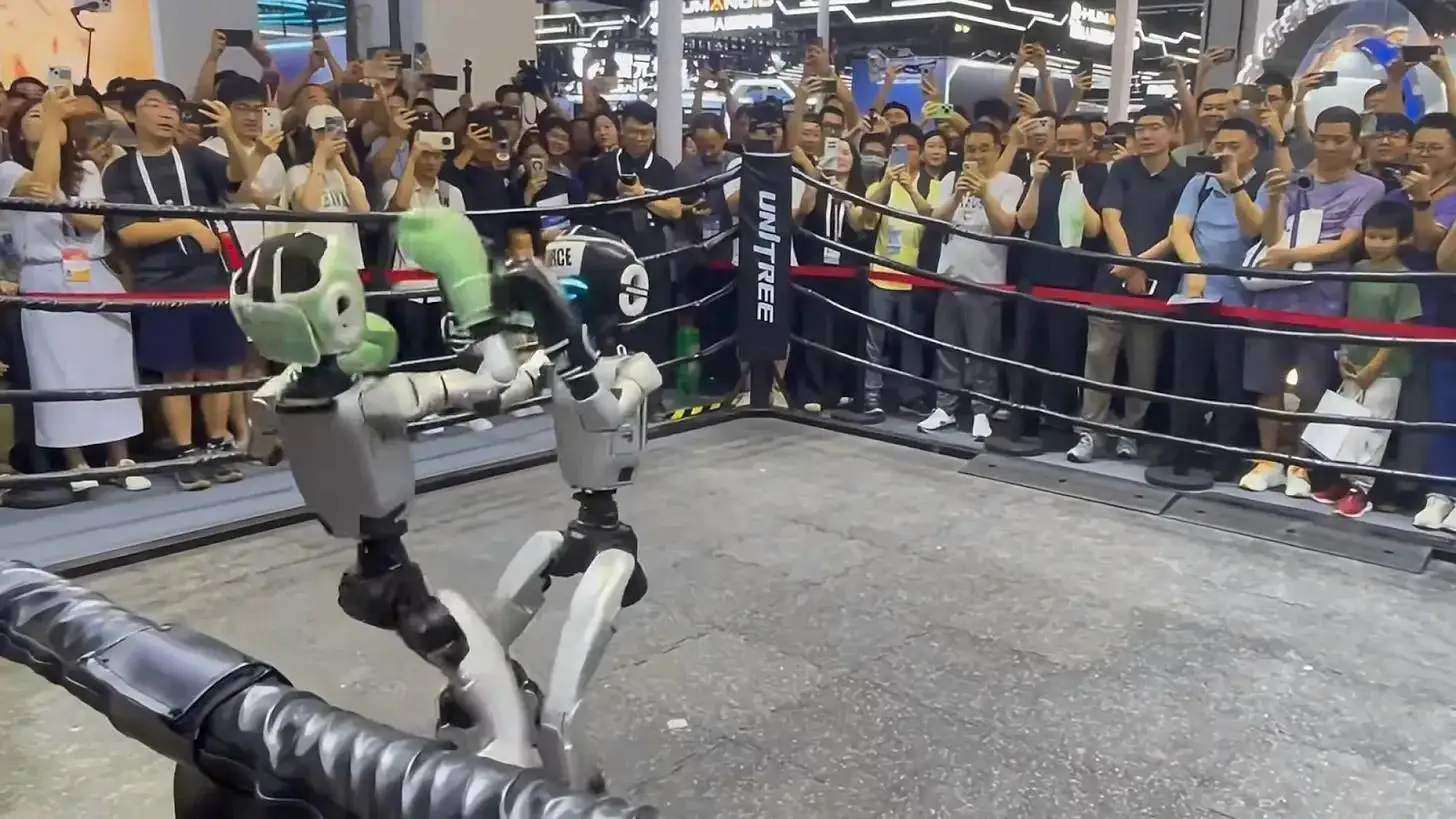
如今,现代机器人的“身体”制造和部署比以往任何时候都更加容易。市场上已经出现了超过100种不同类型的人形机器人,包括特斯拉的Optimus、Unitree的G1、Agility Robotics的Digit和Figure AI的Figure 02等代表性产品。
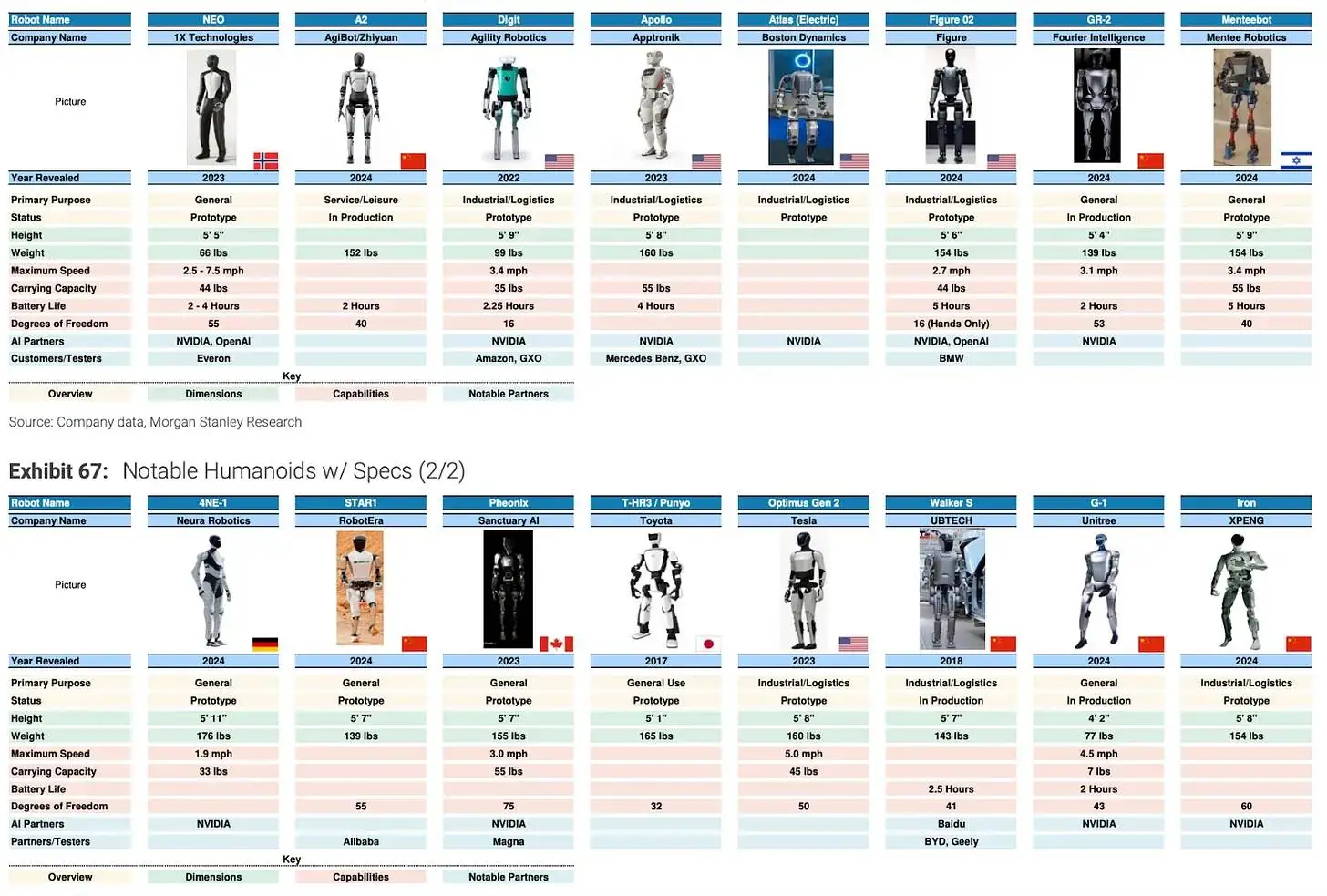
这一进步主要得益于三大关键组件的技术突破。首先是执行器,它相当于机器人的“肌肉”,能够将数字指令转化为精准的运动。高性能电机的创新让机器人能够实现快速而精确的动作,而介电弹性体执行器则适用于需要精细操作的任务。这些技术进步显著提升了机器人的灵活性,例如特斯拉的Optimus Gen 2拥有22个自由度,Unitree的G1也展现了接近人类的灵活性和令人印象深刻的移动能力。
其次是传感器系统,先进的传感器通过视觉、激光雷达、触觉和音频输入使机器人能够感知和理解周围环境。这些技术支持机器人实现安全导航、精准操作和情境感知,为机器人在复杂环境中的运行提供了基础。
最后是嵌入式计算系统,设备上的CPU、GPU和AI加速器能够实时处理传感器数据并运行AI模型,实现自主决策。可靠的低延迟连接确保了各个组件之间的无缝协调,而混合边缘-云架构则允许机器人在需要时将密集型计算任务卸载到云端处理,提升了系统的整体效率。
AI大脑觉醒时刻:机器人如何学会自主思考与决策?
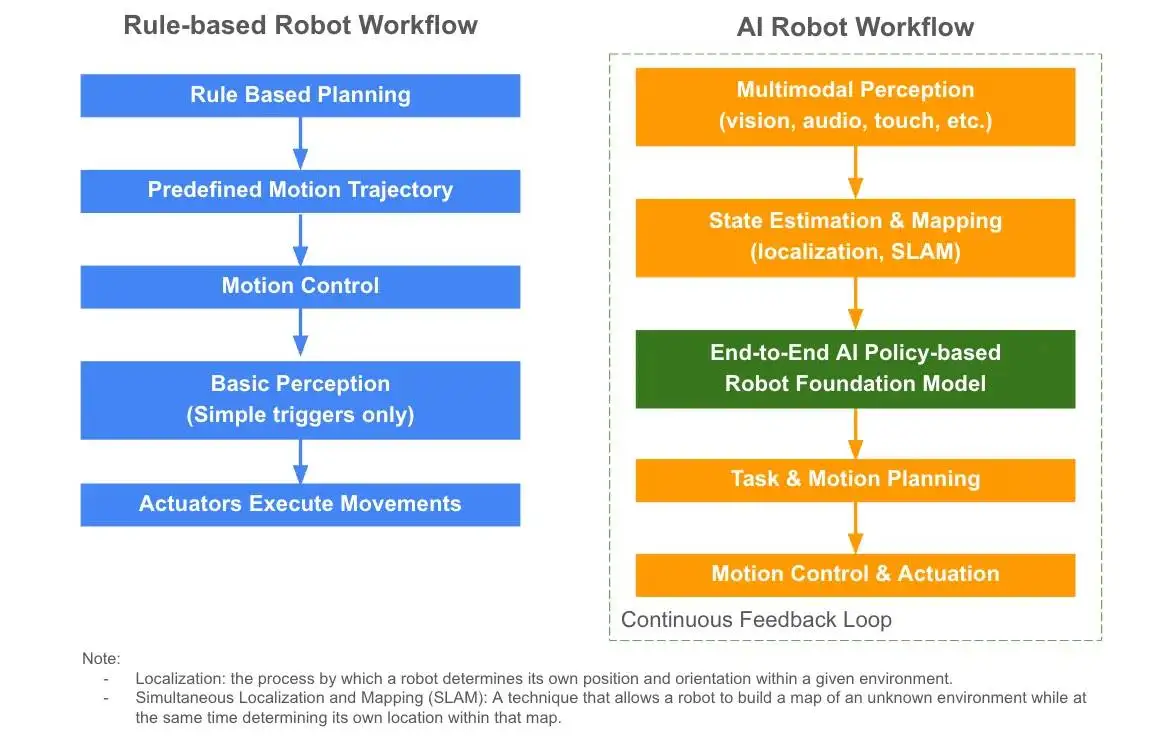
随着机器人硬件日趋成熟,行业焦点正转向构建“机器人大脑”,即的基础模型和先进的控制策略。在AI整合之前,机器人主要依赖基于规则的自动化,只能执行预编程动作,缺乏自适应智能。
如今,基础模型正逐步应用于机器人领域。但仅靠通用的大型语言模型还不够,因为机器人需要在动态物理环境中感知、推理和行动。为满足这些需求,行业正在开发基于策略的端到端机器人基础模型。这些模型使机器人能够接收多模态传感器数据,估算自身状态、绘制环境地图并解释复杂指令,还能生成运动计划并输出控制命令以实现实时执行。它们学习与世界交互的通用策略,让机器人能够适应各种任务,并以更高智能和自主性运行。高级模型还利用持续反馈,使机器人能够从经验中学习,进一步增强在动态环境中的适应能力。
视觉语言动作模型将感官输入直接映射到机器人行动,使机器人能够根据“看到”和“听到”的内容发出适当的控制命令。为增强这些模型,通常会整合多种互补方法:世界模型帮助构建物理环境的内部模拟,协助机器人学习复杂行为、预测结果和规划行动;深度强化学习通过试错帮助机器人学习行为;远程操作允许远程控制并提供训练数据;示范学习则通过模仿人类动作来教授机器人新技能。
最近的一些开源突破标志着该领域的重要进展。然而,大多数机器人基础模型仍然是中心化和闭源的,许多公司保留专有代码和数据集,主要是因为缺乏开放的激励机制。这种透明度的缺失限制了机器人平台之间的协作和互操作性,凸显了对安全透明的模型共享、社区治理的链上标准以及跨设备互操作性层的迫切需求。
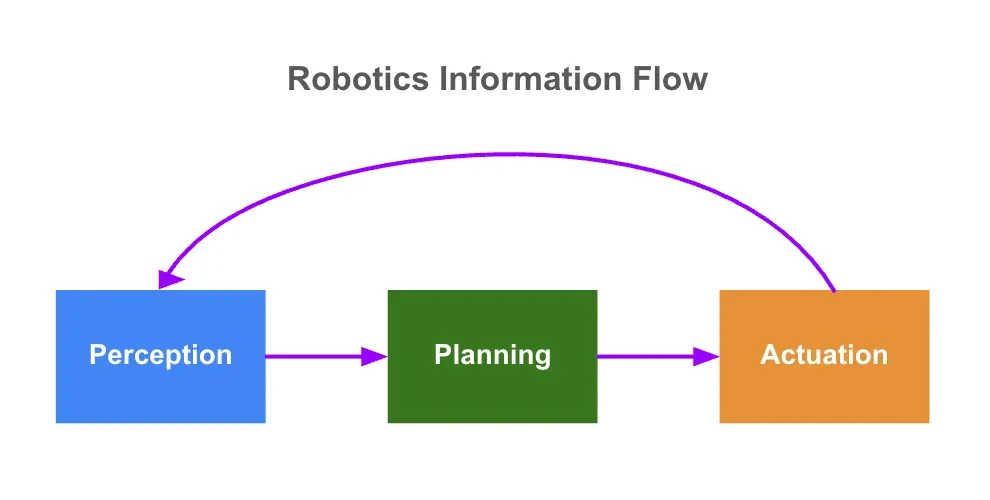
▌机器人智能层技术架构解析
智能层的核心在于感知-规划-行动的闭环系统。如图所示,机器人通过多模态传感器采集环境数据,经由神经网络处理后生成行为策略,最终通过执行器完成物理动作。这种架构实现了从原始数据到具体行动的端到端映射。
在具体实施层面,VLA(视觉-语言-行动)模型通过将自然语言指令转化为具体动作序列,使机器人能够理解高层指令。如图3所示,当接收到"整理桌面"指令时,系统会分解为环境扫描、物品识别、抓取规划和动作执行等多个子任务。
强化学习框架通过试错机制持续优化决策模型。如图4所示,机器人在虚拟环境中进行数万次抓取模拟,将成功经验迁移至真实场景。这种"数字孪生"训练模式显著提升了实际操作的成功率。
机器人数据燃料库:如何构建万亿级训练数据库?
机器人数据集依赖于三个核心支柱:数据数量、质量和多样性。尽管行业已经做出努力,但现有机器人数据集的规模仍然远远不足。例如,OpenAI的GPT-3模型基于3000亿个标记进行训练,而目前最大的开源机器人数据集Open X-Embodiment仅包含100多万条真实机器人轨迹,涵盖22种机器人类型。这与实现泛化能力所需的数据规模相比,差距非常明显。
一些公司采用专有方法收集数据,比如特斯拉通过数据工厂让工作人员穿戴动作捕捉服来生成训练数据。这种方法确实能够获取更多真实运动数据,但成本高昂、数据多样性有限,且难以大规模扩展。
为了应对这些挑战,机器人领域正在利用三种主要数据来源:
互联网数据规模庞大且易于扩展,但主要是观察性数据,缺乏传感器与运动信号。通过在互联网数据上预训练大型视觉语言模型,可以提供有价值的语义和视觉先验。此外,为视频添加运动学标签能够将原始视频转化为可操作的训练数据。
合成数据通过模拟生成,能够快速进行大规模实验并涵盖多样化场景,但无法完全反映现实世界的复杂性,存在“模拟到现实差距”。研究人员通过数据增强、领域随机化和对抗学习等技术来解决这一问题,不断优化模型并在现实环境中测试和微调。
真实世界数据虽然稀缺且昂贵,但对于模型落地和弥合模拟与实际部署之间的差距至关重要。高质量的真实数据通常包括第一视角记录和运动数据,这些数据通过人类示范、远程操作或动作捕捉设备采集,确保模型从准确的真实案例中学习。
研究表明,将互联网数据、真实世界数据与合成数据相结合进行机器人训练,比单独依赖任一数据源能够显著提升训练效率和模型的鲁棒性。与此同时,虽然增加数据数量有所帮助,但数据的多样性更为重要,尤其是为了实现对新任务和不同机器人形态的泛化。要实现这种多样性,需要开放的数据平台和协作式数据共享机制,包括创建支持多种机器人形态的跨实例数据集,从而推动更的基础模型发展。
自主行动派崛起:机器人如何进化成经济个体?
向物理AI代理发展的趋势正在加速,这些自主机器人能够在现实世界中独立行动。代理层的进步取决于模型的精细调整、持续学习以及针对每个机器人独特形态的实际适配。
加速物理AI代理发展的新兴机会包括持续学习与自适应基础设施,通过实时反馈循环和部署期间的共享经验,使机器人能够持续改进。自主代理经济让机器人作为独立经济体运行,在机器人间市场中交易资源,如计算能力和传感器数据,并通过代币化服务生成收入。多代理系统通过下一代平台和算法使机器人群体能够协调、协作并优化集体行为。
Web3破局机器人困局:去中心化网络如何重构万亿市场?
随着AI机器人从研究阶段迈向现实世界的实际部署,多个长期存在的瓶颈正在阻碍创新,并限制机器人生态系统的可扩展性、鲁棒性和经济可行性。这些瓶颈包括数据和模型的中心化孤岛、信任与溯源的缺失、隐私与合规的限制以及互操作性的不足。
机器人模型需要庞大且多样化的数据集,但数据和模型开发高度中心化、分散且成本高昂,导致系统割裂,适应性较差。在动态的现实环境中部署的机器人,往往因数据多样性不足和模型鲁棒性有限而表现不佳。
同时,缺乏透明且可审计的记录削弱了信任与责任感。这成为用户、监管机构和企业采用机器人的主要障碍。在医疗和家庭机器人等敏感应用中,隐私保护至关重要,并且必须遵守严格的地区性法规。中心化基础设施在支持安全且隐私保护的AI协作方面存在困难,限制了数据共享,并抑制了在受监管或敏感领域的创新。
此外,机器人系统在资源共享、协同学习以及跨多种平台和形态的集成方面面临重大挑战。这些限制导致网络效应的分裂,并阻碍了能力在不同机器人类型之间的快速转移。
Web3技术通过去中心化、可验证、隐私保护和协作式的机器人网络,根本性地解决了上述痛点。这种融合正在开辟新的投资市场机会,包括去中心化的协作开发、可验证的溯源与责任、隐私保护的协作、社区驱动的治理、跨形态互操作性、自主代理经济以及去中心化物理基础设施网络(DePIN)。
基于区块链的点对点计算、感知、存储和连接资源共享,增强了机器人网络的可扩展性和弹性。Web3基础设施赋予机器人独立的经济代理身份,使其能够进行点对点交易、协商并参与代币化市场,无需人工干预。这种方法将促进信任、合作,并推动该领域更的发展。
AI机器人四大致命弱点:为什么传统技术走到了尽头?
随着AI机器人从研究阶段迈向现实世界的实际部署,多个长期存在的瓶颈正在阻碍创新,并限制机器人生态系统的可扩展性、鲁棒性和经济可行性。这些瓶颈主要体现在四个方面。
首先是中心化数据与模型孤岛问题。机器人模型需要庞大且多样化的数据集,但当今的数据和模型开发高度中心化、分散且成本高昂,导致系统割裂,适应性较差。在动态的现实环境中部署的机器人,往往因数据多样性不足和模型鲁棒性有限而表现不佳。
其次是信任、溯源与可靠性的缺失。缺乏透明且可审计的记录,包括数据来源、模型训练过程和机器人操作历史,这削弱了信任与责任感。这成为用户、监管机构和企业采用机器人的主要障碍。
第三是隐私、安全与合规挑战。在医疗和家庭机器人等敏感应用中,隐私保护至关重要,并且必须遵守严格的地区性法规。中心化基础设施在支持安全且隐私保护的AI协作方面存在困难,限制了数据共享,并抑制了在受监管或敏感领域的创新。
最后是可扩展性与互作性问题。机器人系统在资源共享、协同学习以及跨多种平台和形态的集成方面面临重大挑战。这些限制导致网络效应的分裂,并阻碍了能力在不同机器人类型之间的快速转移。
Web3如何破局:七大投资赛道全解析
Web3技术通过去中心化、可验证、隐私保护和协作式的机器人网络,从根本上解决了AI机器人面临的核心痛点。这种融合正在开辟多个新的投资市场机会。
去中心化的协作开发网络通过激励驱动的机制,让机器人能够共享数据并共同开发模型和智能代理。区块链技术提供了可验证的溯源与责任体系,确保数据和模型的来源、机器人身份及操作历史都有不可篡改的记录,这对建立信任和满足合规要求至关重要。
隐私保护的协作方案利用先进的密码学解决方案,使机器人能够在不暴露专有或敏感数据的情况下共同训练模型并分享见解。社区驱动的治理通过去中心化自治组织(DAOs)实现,以链上透明且包容的规则和政策来指导并监督机器人操作。
跨形态互操作性基于区块链的开放框架,促进了不同机器人平台之间的无缝协作,降低开发成本并加速能力转移。自主代理经济系统赋予机器人独立的经济代理身份,使其能够进行点对点交易、协商并参与代币化市场,无需人工干预。
最后,去中心化物理基础设施网络(DePIN)通过基于区块链的点对点计算、感知、存储和连接资源共享,增强了机器人网络的可扩展性和弹性。这些结构性解决方案共同构成了Web3赋能机器人领域的关键投资赛道。
Web3+机器人实战案例库:Drive to Earn如何收集2000小时数据?
Web3驱动的平台通过激励贡献者参与数据采集,实现了数据与模型开发的民主化。这种方式能够构建出比任何单一公司所能提供的更丰富、更多样化的数据集,尤其对于在不可预测环境中运行的机器人来说,覆盖边界案例的能力至关重要。
以Hume协议为例,他们通过机器人游戏进行现实世界数据集的众包。其推出的“Drive to Earn”项目是一个人行道机器人和全球性游戏,成功创建了涵盖10多个城市、累计约2000小时的遥控机器人驾驶数据集。该数据集包含摄像头画面、GPS数据、音频记录和人类操控数据,为机器人训练提供了宝贵资源。
另一个案例是FrodoBots,这是由FrodoBots Lab和Protocol Labs联合开发的加密激励平台,基于Solana区块链及其子网架构。每个子网被设定为公开挑战,贡献者通过提交模型或数据来获取代币奖励,有效激励了全球协作和开源创新。
AGI Society则致力于构建AGI机器人开放生态的基础层,提供动作捕捉服,使任何人都能记录并通过自己的真实运动数据获利,推动了复杂人形机器人数据集的开放化。
这些项目展示了如何利用分布式数据验证系统和代币激励机制,解决机器人领域高质量数据稀缺的痛点,为下一代机器人发展奠定了坚实的数据基础。
未来3-5年黄金窗口:机器人+Web3将如何改变世界?
随着AI机器人与Web3技术的深度融合,我们正迈入一个全新的时代,自主系统将能够实现大规模协作与适应。未来三到五年将是关键发展期,硬件技术的快速进步将催生更的AI模型,这些模型将依托更丰富的现实世界数据集和去中心化协作机制。我们预计,专用AI代理将在酒店业、物流等多个行业崭露头角,创造巨大的新市场机会。
然而,AI机器人与加密技术的融合也面临诸多挑战。设计平衡且有效的激励机制仍然复杂且处于不断演化中,系统需要在公平奖励贡献者的同时防止被滥用。技术上的复杂性也是一大难题,亟需开发稳健且可扩展的解决方案,以实现多种机器人类型的无缝集成。此外,隐私保护技术必须足够可靠,才能赢得利益相关者的信任,尤其是在处理敏感数据时。快速变化的监管环境也要求我们谨慎应对,以确保在不同司法辖区内的合规性。解决这些风险并实现可持续回报,是推动技术进步和广泛应用的关键。